因为目前网上各处对于Aho-Corasick算法,在关键点上的解释都太简单随便,实在不如我意,所以在此用自己的语言记录一遍。
PS: 如果已经理解了该算法原理,或想要先拿到代码实现的话,请直接跳转至最后一节。
1. 什么是Aho-Corasick算法
Aho-Corasick又被简称为AC自动机,是一种基于前缀的,使用了确定有限自动机(DFA)原理的,字符串多模匹配算法。
2. 什么是DFA
DFA也就是确定有限自动机,英文全称是Deterministic Finite Automaton。具体的细节介绍,可以参照百度百科、维基百科,以及《算法导论》之类的算法书。在这里,我们尝试用通俗的语言和图示来解释一遍。
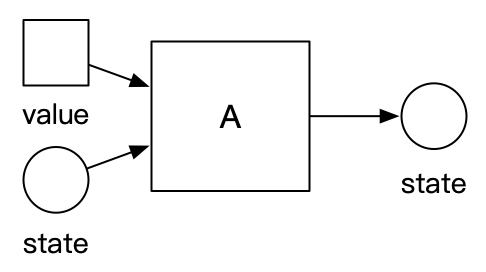
我们一个一个字母的来解释。首先,什么是自动机(A)。自动机就是一个代码块。这段代码块只做一件事,那就是接收输入值,和状态值,输出同为状态值的结果。用图示来表述,就是下面这样:
下一个字母——有限(F),是指自动机接收、输入的状态种类是有限的。而相对应的,非有限自动机的状态就是有无限种的。
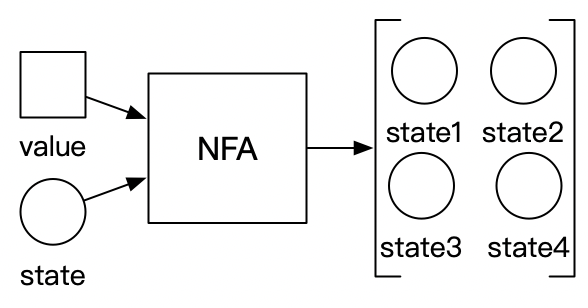
再下一个字母——确定的(D),是指自动机的输出状态是单一的一个状态。如果不太好理解的话,那就是看一下对应的非确定自动机。这种自动机的输出状态,就不是单一的,而是许多个状态的集合。用图示来表述,就是下面这样:
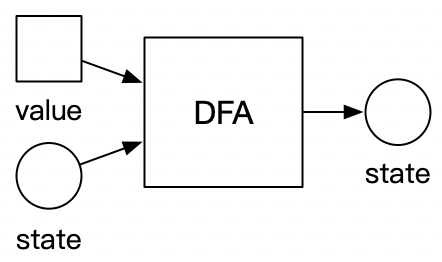
所以三个字母合起来以后,DFA的意思就像英文全称一样了,是一种状态值种类有限,且返回结果单一的自动机。举个简单的代码例子:
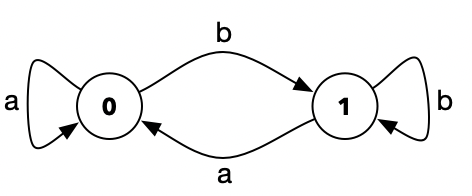
1 | def automata(value, state): |
上面的这段代码,其内部的状态转化逻辑,可以用图示表示,也就是所谓的状态转化图:
而更加复杂的自动机状态转化图,可以参照下面这张截取自百度百科的图示:
3. Tire Tree
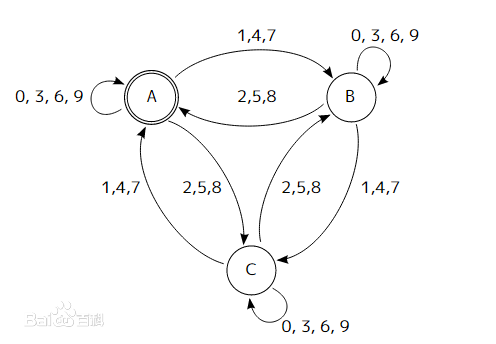
上一节对DFA进行了介绍,那么现在实际操作一把,构建一个DFA状态转化图,使得输入下面三条字符串以后,都能得到终点态: aababbaba、aaabbaba、aabababa
我们先用纸笔画一画,会得到下面这样的状态转化图:

状态0为初始态,状态9为终点态。虽然可能不是十分完善,但我们输入上面那三条字符串的任意一条,都能成功的得到终点态9。那么既然能用纸笔画出来,我们就能用代码实现出来。大致构想一下代码的数据结构和逻辑,应该是下面这样:
- 1) 首先,数据结构应该是使用链表来表示每个节点
- 2) 其次,代码逻辑大致有下面这几步:
- 2.1) 接收输入的字符,判断是否和当前状态所在节点的字符内容相同
- 2.2) 如果不同,或者当前状态节点为初始态节点,则为本次输入字符新建节点。然后将当前状态所在节点的next指针,指向新建的节点
- 2.3) 如果相同,则略过本次输入,跳转至步骤2.1接收下一个字符
我们按照这样的逻辑实现了以后,输入上面那三条字符串,会发现得到的结果,跟我们用纸笔画出的状态转化图不一样,而是像下面这样:
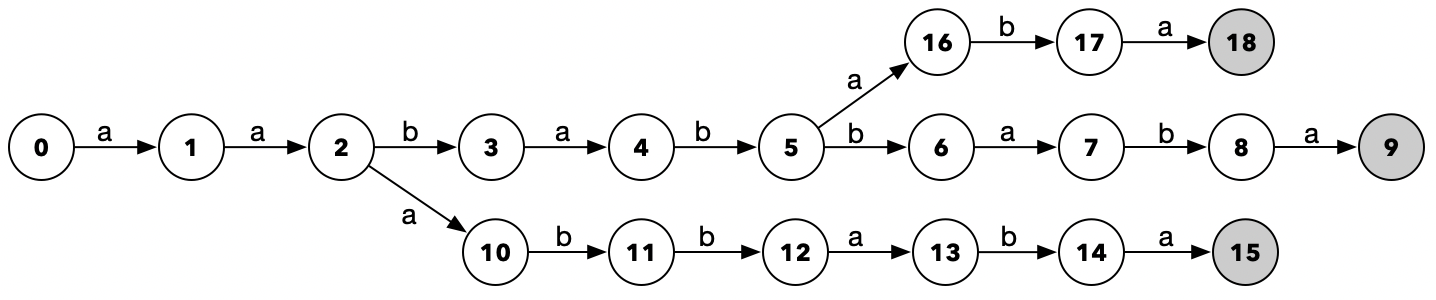
跟我们用纸笔画出来的图示,区别在于变成了树状的分叉结构。而这种我们无意之间得到的树状分叉结构,只要把状态节点,换成对应的输入字符内容,就是Tire Tree了,也叫做单词查找树。更加详细的介绍,可以参照算法书及各种百科和帖子。不过在这里,我们关注的重点是,Tire Tree和DFA的关系。
4. Aho-Corasick
按照上一节中生成Tire Tree类似结构DFA的代码设计,我们输入下面这三条字符串: his、hers、she。可以得到下面这样的状态转化图:
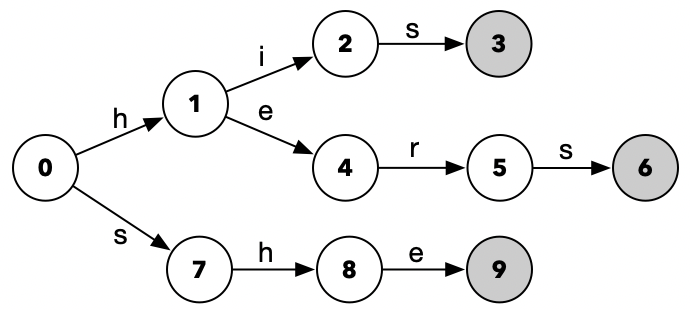
看着这个状态转化图,我们发现,或许可以拿来用做字符串匹配。比如我们输入这样一段内容: hisdef,当输入了s以后,我们就得到了终点态,所以我们可以判定当前字符串内包含有his。
可是,如果我们输入的是abchisdef呢?想要得到终点态,就得略过前面的abc。那如果我们输入的是shis呢?匹配she的时候匹配一半,就得切换到对his的匹配。因此,我们发现需要对这种状态树做一点改进。
在其他的帖子对Aho-Corasick算法的介绍里,都共同提到的一个重要点,就是想对于Tire Tree,Aho-Corasick算法多了一个Fail路径(失败路径)。还是用上面的his、hers、she做例子,添加了红色虚线Fail路径的状态转化图,像下面这样:
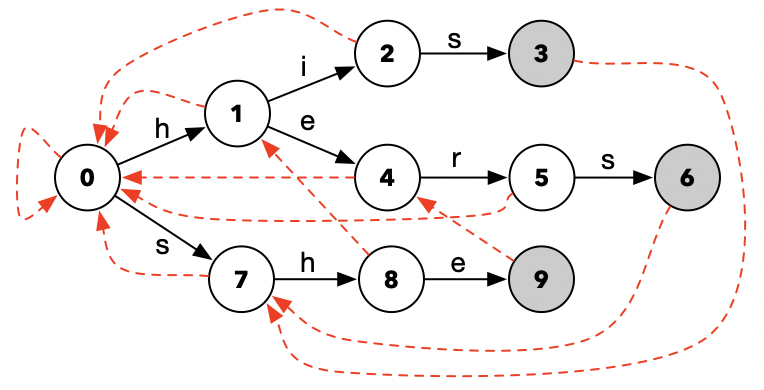
那这些红色的Fail路径的用法,就是如果我们输入的字符内容,无法使状态值,从当前状态节点,跳转到下一个预定的状态节点,我们就通过Fail路径,回溯到前面的某一个状态节点。举个例子,正常情况下的跳转动作是这样的: f(1, i) = 2。而当我们的输入值不是1和i的时候,就无法得到2了,得到的则是0,即f(1, x) = 0。
4.1 如何构建Fail路径
可是为什么要这样做呢?我们先看下该怎样构建Fail路径。同时,这一部分也是其他帖子里解释不够清晰的重要内容。总结为一句话,Fail路径,就是指向另一个,可以作为某一范式前缀的节点。其构建逻辑,可以分解成下面这几步:
- 1) 如果自己是根节点,则指向自己
- 2) 如果自己的父节点是根节点,则指向根节点
- 3) 找到自己父节点Fail路径指向的节点,如果这个节点可以正常接收自己的输入字符,那么就指向这个节点接收自己输入字符后,所指向的那个节点
- 4) 如果自己父节点Fail路径指向的节点不满足,就按照第3步的判断,检查自己父节点的父节点的Fail路径指向的节点
- 5) 一直父节点、父节点、父节点这样的回溯,直到根节点还没找到的话,那么就指向根节点
我们按照上面说的步骤来,一步一步分析刚才his、hers、she例子得到的状态转化图。
- 1) 首先是0节点,因为是根节点,所以就指向了它自己,也就是0 -> 0
- 2) 然后是1节点,1节点的父节点是0节点也就是根节点,所以指向0节点,也就是1 -> 0
- 3) 2节点的父节点是1节点,1节点的Fail路径指向了0节点。那么因为0节点,不能正常接收2节点的输入字符也就是i,所以我们继续回溯去看2节点的父节点的父节点,也就是0节点。这时,因为已经回溯到了根节点,所以按照逻辑,我们只能最终确定指向0,也就是2 -> 0
- 4) 3节点的父节点是2节点,2节点的Fail路径指向了0节点。那么因为0节点,可以正常接收3节点的输入字符也就是h,所以3节点就应该指向,0节点接收了h后指向的节点,也就是6。所以最终,我们得到3 -> 6
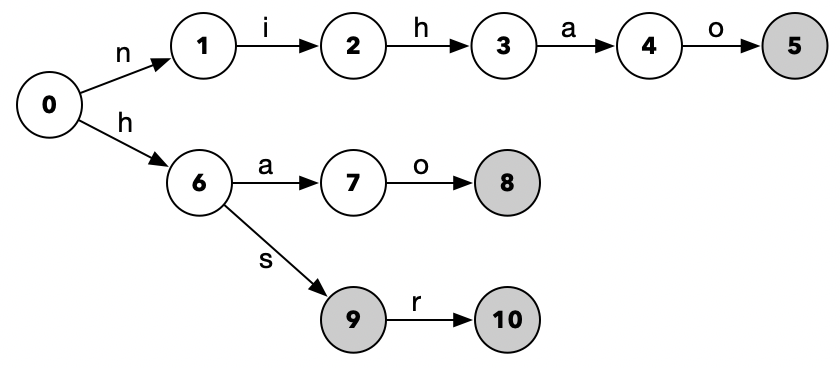
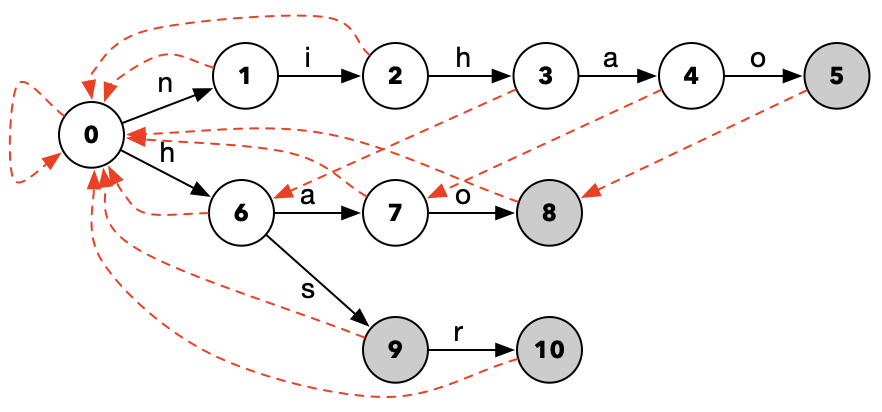
后面其他节点的Fail路径,可以按照这样的逻辑一步步分析得到,所以就不啰嗦了。不过我们再提供另外一个例子,通过字符串nihao、hao、hs、hsr得到的状态转化图是下面这样:
然后添上Fail路径:
4.2 如何进行状态跳转
正常路径的跳转很简单,我们主要关注Fail路径的使用。和其文本含义一样,即当正常路径失败时,就通过Fail路径跳转。还是使用his、hers、she的状态转化图来举个例子,当我们输入ushhis时,详细的跳转步骤是下面这样的:
- 1) 当前状态0,输入u,无法正常跳转,进入Fail路径,到达状态0
- 2) 当前状态0,输入s,可以正常跳转,到达状态7
- 3) 当前状态7,输入h,可以正常跳转,到达状态8
- 4) 当前状态8,输入h,无法正常跳转,进入Fail路径,到达状态1
- 5) 当前状态1,输入i,可以正常跳转,到达状态2
- 6) 当前状态2,输入s,可以正常跳转,到达状态3
当我们执行到上面的第八步时,我们发现状态3是一个终点态。所以,我们可以判定,此时我们找到了范式his。
上面只是一个简单的例子,除此之外还有一些临界情况不太好处理,比如我们从一个终点态,通过Fail路径跳转到了另一个终点态。而这里,也同样是其他帖子里解释不够清晰的重要内容,所以我们详细的来介绍状态节点间的跳转逻辑:
- 1) 如果当前这个节点,可以正常接收输入值,那么就跳转到输入值对应的下一个节点,本轮跳转结束,接收下一个输入值以进入下一轮跳转
- 2) 如果当前这个节点,不能正常接收输入值,那么就先跳转到自己Fail路径指向的节点,然后再尝试执行第一步
- 3) 如果现在已经跳转回到了根节点,那么先尝试第一步,如果失败,则就不再执行第二步,而是停留在根节点了,本轮跳转结束,接收下一个输入值以进入下一轮跳转
4.3 如何得到匹配结果
在上一节中,我们介绍了如何进行状态跳转,那如何得到匹配结果呢?
匹配结果由两部分组成:
- 1) 每轮跳转结束后,所停留在的节点,如果是终点态,则该节点对应的模式串匹配成功
- 2) 从停留的节点开始,一路沿Fail路径递归至根节点,期间路过的所有的节点,只要是终点态节点,则该节点对应的模式串也就匹配成功
用nihao、hao、hs、hsr的状态转化图举例。如果经过跳转后,停留在节点5,那么因为节点5是终点态,所以
节点5对应的模式串nihao就匹配成功了。然后我们沿着Fail路径递归至节点8,因为节点8也是终点态,所以节点8对应的模式串hao也匹配成功了。再继续沿着Fail路径递归,这时候我们到了根节点,那么至此,这一轮匹配结束。
4.4 Fail路径的意义
经过上面几节的介绍,我们已经知道了如何创建、使用Aho-Corasick算法实现,但我们一直不明白的是,Fail路径为什么这样构建,为什么能起作用。
为了解释这个问题,让我们回到本文最开始的位置。在第一节中,我们用一句话解释了什么是Aho-Corasick算法,而那句话中的“基于前缀的”这五个字,就是答案。
在我们使用Fail路径跳转的时候,我们发现,Fail路径所指向的节点,其所在的正常状态节点链上,从根节点开始,到该节点为止,每个节点组成的字符串,必定是某一个范式的前缀。
举个例子,由his、hers、she所组成的状态转化图里,节点9的Fail节点,指向了节点4。那么在节点4所在的这条状态节点链上,从根节点0开始,到节点4为止,一共0、1、4三个节点所组成的字符串是he,而he就是hers范式的前缀。
因此理解了为什Fail路径要这样指向以后,我们就弄懂了构建Fail路径的步骤。在构建Fail路径过程中,我们反复的回溯,其实就是在试图拓展上一步找到的前缀,而得到此范式的更长前缀。
5. 代码实现
Tire Tree和Aho-Corasick算法的Python封装实现,已经开源上传至github并支持PyPI安装。